מודולים ורכיבים להמרת אותות
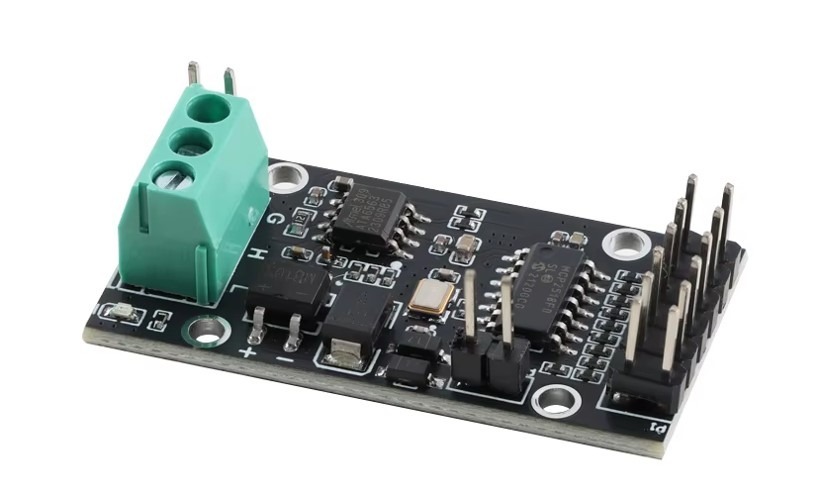
מודול MCP2518FD ממיר SPI – CAN-FD
₪65
MCP2518FD SPI interface to CAN FD
זמינות: קיים במלאי
מודול המאפשר לבקר MCU לתקשר עם רכיבי CAN-BUS באמצעות פרוטוקול SPI עם שינוי אחד משמעותי ביחס ל- CAN רגיל , המודול הזה מאפשר תקשורת בתקן CAN-FD
החיבור מתבצע בשרשרת הבאה:
MCU (Arduino/ESP32) <– SPI –> MCP2518FD <– Digital signals –> CAN Transceiver <– Differential pair –> CAN Bus
- מהירות: CAN רגיל מוגבל ל-1Mbps. תקן FD מאפשר קצבי נתונים של עד 8Mbps (כתלות בחומרה).
- נפח נתונים (Payload): במקום 8 בתים בלבד להודעה, CAN FD תומך בעד 64 בתים להודעה אחת.
- תאימות: ה-MCP2518FD תומך גם ב-CAN FD וגם ב-Classic CAN 2.0B.
מפרט ונתונים:
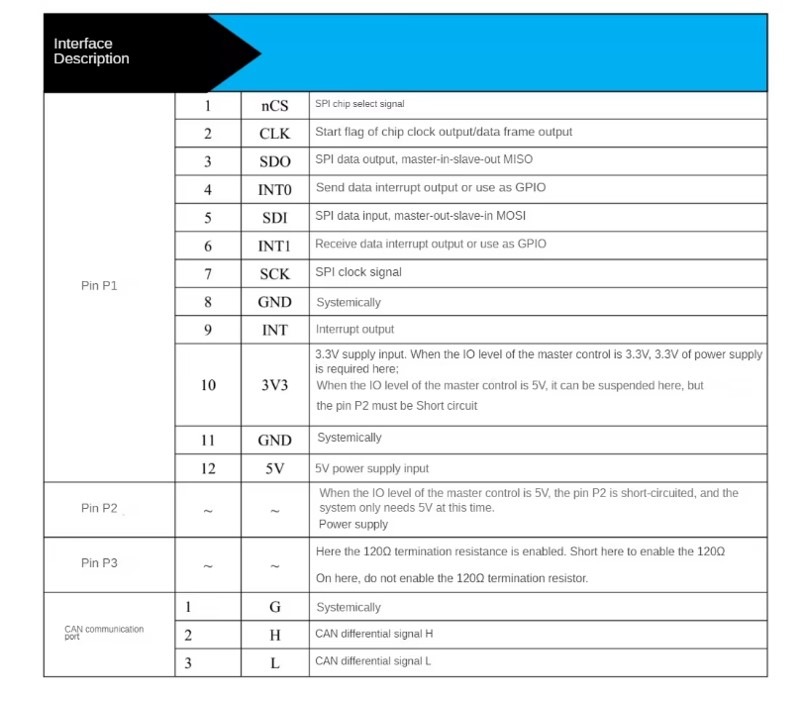
- ממשק תקשורת: מתחבר למיקרו-בקר באמצעות SPI (מהירות שעון של עד 20MHz).
- זיכרון RAM: כולל 2KB של זיכרון RAM להודעות (Message RAM), המאפשר הגדרת חוצצים (Buffers) גמישים לשידור וקליטה.
- סינון (Filtering): כולל 32 מסנני קבלה (Acceptance Filters) ו-32 מסיכות (Masks), מה שמאפשר ל-MCU להתעלם מהודעות לא רלוונטיות ולחסוך בכוח עיבוד.
- צריכת חשמל: נמוכה מאוד במצב שינה (Sleep mode), אידיאלי למערכות המופעלות בסוללה.
- מתח עבודה: לרוב 3.3V עבור הבקר, אך המודול עשוי לדרוש 5V עבור ה-Transceiver (כתלות בדגם הספציפי).
יתרונות המודול
- גמישות: ניתן להוסיף יכולות CAN FD לכל מעבד פשוט (כמו Arduino Nano או Raspberry Pi Pico) דרך 4 חוטי SPI בלבד.
- ביצועים: בזכות ה-RAM המובנה, המודול מסוגל לטפל בעומסי תעבורה גבוהים בלי להעמיס על המעבד הראשי.
- אמינות: כולל מנגנוני זיהוי שגיאות מתקדמים (CRC משופר) המובנים בתקן CAN FD.
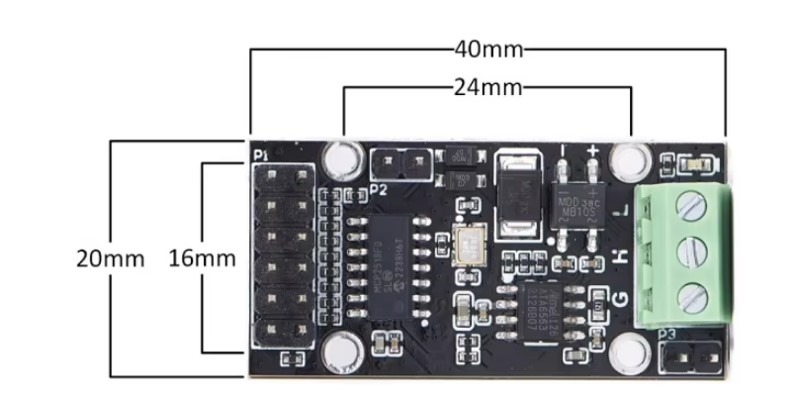
| מידות | 44 × 28 מילימטרים |
|---|---|
| ספריית ARDUINO I2C CAN BUS | |
| דף המוצר באתר היצרן |