מודולים ורכיבים להמרת אותות
מודול TJA1051T משדר-מקלט CAN
₪45
TJA1051T Pal – CAN Module Tranceiver
זמינות: קיים במלאי
מודול המאפשר לבקר MCU לתקשר עם רכיבי CAN , אבל לא להתבלבל , ה- Tx ו- Rx אינם מכוונים לתקשורת UART !
- UART: הוא פרוטוקול תקשורת (כמו זה שמשמש לתקשורת טורית רגילה ב-Arduino).
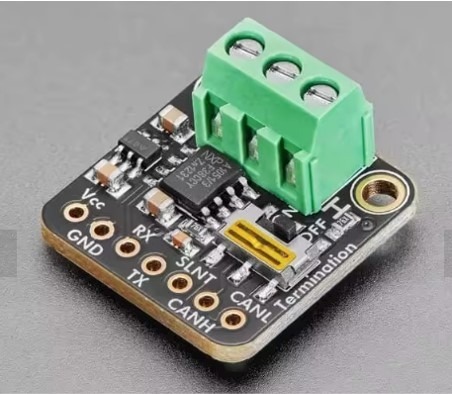
- המודול שבתמונה (TJA1051T/3): הוא Transceiver (משדר-מקלט). הוא לא "מבין" פרוטוקולים; התפקיד שלו הוא רק פיזי – לקחת אותות לוגיים (0 ו-1) ולהפוך אותם להפרשי מתחים על קווי ה-CANH וה-CANL (ולהיפך).
כדי שמיקרו-בקר יוכל לדבר עם המודול שבתמונה, הוא חייב לכלול רכיב שנקרא CAN Controller.
- במעבדים כמו ESP32 או STM32F407 , הבקר הזה כבר נמצא בתוך הצ'יפ. לכן, אתה מחבר את פיני ה-TX/RX של בקר ה-CAN המובנה ישירות למודול ה-CAN Pal, והוא מוציא את זה לרשת.
- במעבדים פשוטים יותר (כמו Arduino Nano), אין בקר CAN מובנה. במקרה כזה, המודול הזה לבדו לא יעזור, ונדרש להוסיף בקר חיצוני כמו ה-MCP2518FD שמתממשק ב-SPI.
מפרט ונתונים:
-
- השבב המרכזי (NXP TJA1051T/3): זהו הלב של המודול, ה-Transceiver שתומך ב-CAN FD ובמתחי לוגיקה של 3.3V.
- טרמינל ירוק (Screw Terminal): מאפשר חיבור נוח ומאובטח של חוטי רשת ה-CAN (CAN High, CAN Low ואדמה/סיכוך במידה ויש).
- מפסק Termination (ON/OFF): זהו פיצ'ר נוח מאוד. הוא מאפשר להפעיל או לנטרל נגד סיום של 120Ω בלחיצת כפתור.
- אם המודול נמצא בקצה של רשת ה-CAN, יש להעביר למצב ON.
- אם הוא נמצא באמצע השרשרת, יש להשאיר על OFF.
-
חיבורי הפינים (Header Pins)
- Vcc: כניסת מתח (בד"כ 5V) להפעלת ה-Transceiver.
- GND: אדמה משותפת למערכת.
- RX: יציאת הנתונים המתחברת לפין ה-RX במיקרו-בקר או בבקר ה-CAN.
- TX: כניסת הנתונים המתחברת לפין ה-TX במיקרו-בקר או בבקר ה-CAN.
- SLNT (Silent): פין בקרה להשתקת המשדר. בחיבור לאדמה (Low) המודול עובד כרגיל. בחיבור למתח גבוה (High) הוא עובר למצב האזנה בלבד.
- CANH / CANL: שכפול של קווי ה-CAN הדיפרנציאליים (למקרה שרוצים להלחים חוטים ישירות במקום להשתמש בטרמינל הירוק).
| מידות | 44 × 28 מילימטרים |
|---|---|
| ספריית ARDUINO I2C CAN BUS | |
| דף המוצר באתר היצרן |